 EN
EN
 AR
AR
 HR
HR
 DA
DA
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 IS
IS
 HY
HY
 AZ
AZ
 KA
KA
 BN
BN
 LA
LA
 MR
MR
 MY
MY
 KK
KK
 UZ
UZ
 KY
KY
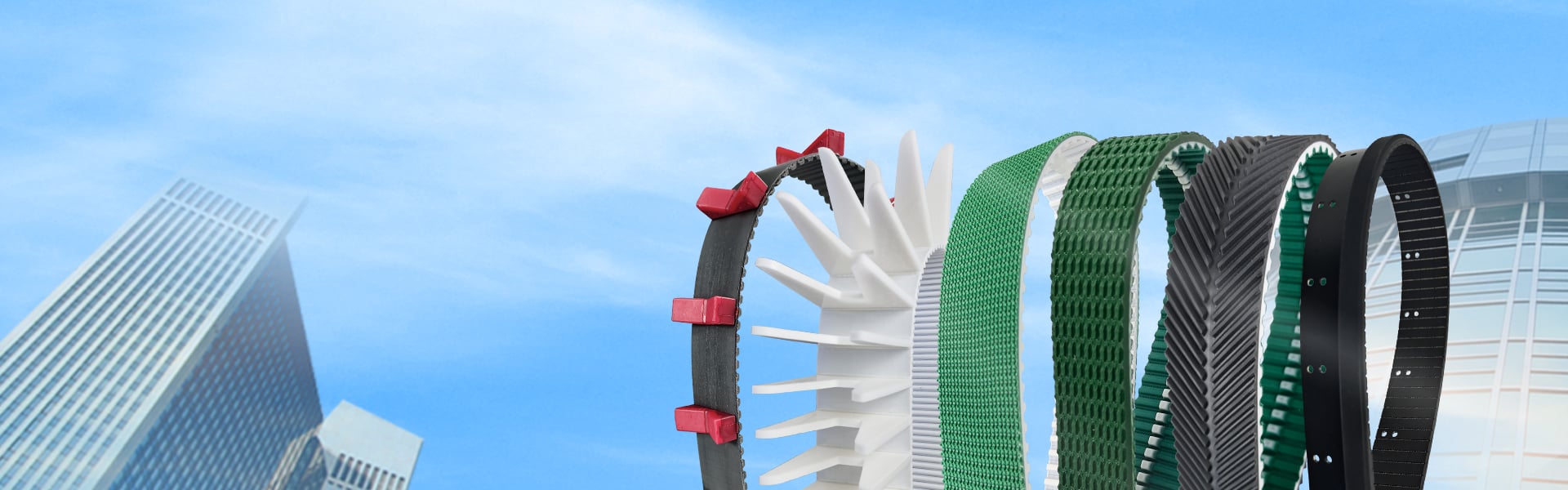





Curele de distribuție cu magneți încorporați pentru roboții care urcă pe pereți
Curele de distribuție de înaltă performanță cu magneți permanenți încorporați, proiectate personalizat pentru roboții care urcă pe pereți. Dotate cu poliuretan de înaltă rezistență, magneți din neodim ușori și armare fără alungire. Optimizați aderența verticală și sincronizarea transmisiei robotului dvs. cu curelele magnetice de precizie ale Yonghang.
- Introducere
Introducere
Curele sincrone încorporate magnetice: Încredințarea robotilor de urcat pe pereți
Robotii de urcat pe pereți necesită un echilibru perfect între mobilitatea ușoară și aderența magnetică fiabilă. Produsele noastre Curele sincrone încorporate magnetice sunt concepute pentru a oferi simultan sincronizarea antrenării și forța de reținere verticală. Prin încorporarea directă a magneților de înaltă putere în cureaua din PU cu coeficient ridicat de frecare, aceste curele permit robotilor să parcurgă suprafețe verticale de oțel — cum ar fi carenele navelor, rezervoarele de stocare și infrastructura industrială — cu încredere.
Spre deosebire de piste magnetice exterioare, designul nostru integrat asigură un profil liniar și compact, reducând semnificativ greutatea robotului, fără a compromite forța maximă de aderență.
Inginerie avansată pentru operațiuni verticale:
Configurație optimizată a matricei magnetice: Utilizăm magneți de înaltă densitate, Neodim (NdFeB) poziționați cu precizie și etanșați în interiorul curelei pentru a maximiza valoarea Gauss, păstrând în același timp integritatea structurală.
Aderență și tracțiune superioare: Beltul de bază este produs din poliuretan cu coeficient ridicat de frecare , asigurând faptul că roțile de antrenare nu alunecă în timpul tranzițiilor verticale sau al opririlor bruște.
Greutate redusă, rezistență ridicată: Întărit cu Corduri din Kevlar sau oțel , aceste benzi oferă forța de tracțiune necesară pentru a susține greutatea robotului, fără ca banda să se întindă sau să cedeze în timp.
Amortizare a vibrațiilor: Baza din PU acționează ca un amortizor, netezind mișcarea robotului pe suprafețe neuniforme de oțel și protejând structura magnetică internă.
| Caracteristică | Specificație |
| Tipul principal de bandă | T10 / AT10 / 8M / 5M (personalizabil) |
| Materialul benzi | Poliuretan termoplastic (PU) cu aderență ridicată |
| Material al magnetului | Neodim industrial (NdFeB) |
| Forță de aderență | Personalizat în funcție de densitatea magnetului (N/cm²) |
| Reforțare | Kevlar (pentru greutate redusă) sau cablu din oțel (pentru sarcină ridicată) |
| Finisare suprafață | Textură netedă sau antiderapantă |
| Toleranță de poziționare | ±0,05 mm (găuri CNC de precizie) |
| Rezistență la substanțe chimice | Rezistent la uleiuri, apă și lichide de curățare |
| Temperatură de operare | -10°C până la +70°C |
💡 Sfaturi de inginerie pentru personalizare:
Optimizarea Greutății: Pentru aplicațiile de urcare pe pereți, greutatea este esențială. Vă recomandăm cu tărie Armare din Kevlar combinat cu Magneți din neodim (NdFeB) pentru a obține cel mai ridicat raport „Aderență-la-Greutate”.
Fricțiunea la suprafață (antiderapantă): Dacă robotul funcționează pe suprafețe netede sau înclinate, se recomandă o soluție secundară strat de cauciuc moale de 1 mm peste magneți. Această soluție nu doar protejează magneții împotriva impacturilor, ci oferă și frecvența necesară pentru a preveni alunecarea în jos.
Compatibilitatea cu rolele de transmisie: Dacă magneții sunt încorporați pe partea danturată, vă rugăm să vă asigurați că rolele de antrenare sunt fabricate din materiale nemagnetice (de exemplu, aluminiu sau oțel inoxidabil din seria 300) pentru a evita forța de tragere magnetică sau interferența de blocare.







