 EN
EN
 AR
AR
 HR
HR
 DA
DA
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 IS
IS
 HY
HY
 AZ
AZ
 KA
KA
 BN
BN
 LA
LA
 MR
MR
 MY
MY
 KK
KK
 UZ
UZ
 KY
KY
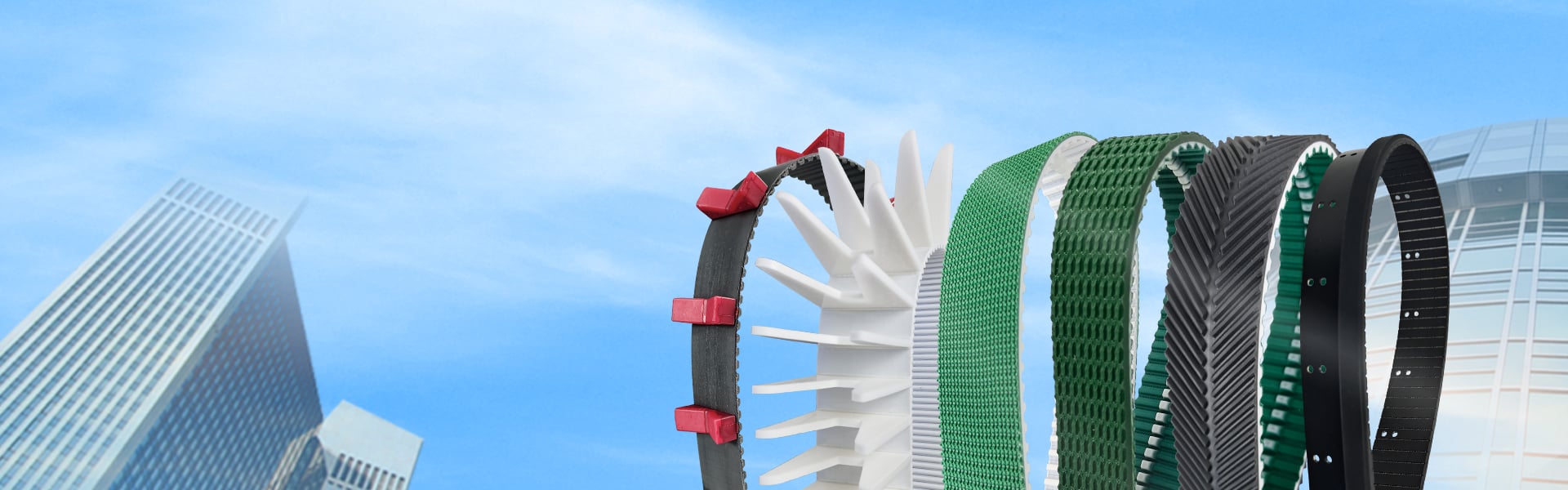





Მაგნიტური ჩაშენებული დროგანაკვეთი ბელტები კედლის ასვლელი რობოტებისთვის
Სასწრაფო მუშაობის დროგანაკვეთი ბელტები ჩაშენებული მუდმივი მაგნიტებით, რომლებიც სპეციალურად შეიმუშავებულია კედლის ასვლელი რობოტებისთვის. მათ ახასიათებს მაღალი ძალადობის PU მასალა, მსუბუქი ნეოდიმიუმის მაგნიტები და გაჭიმვის გარეშე გაძლიერება. გააუმჯობესეთ თქვენი რობოტის ვერტიკალური მიბმა და მოძრავი სინქრონიზაცია Yonghang-ის სიზუსტით შემუშავებული მაგნიტური ბელტების საშუალებით.
- Შესავალება
Შესავალება
Მაგნიტური ჩაშენებული სინქრონიზაციის ბელტები: კედლის ასვლელი რობოტების ძალადობა
Კედლის ასვლელი რობოტებისთვის სჭირდება მსუბუქი მოძრაობისა და სანდო მაგნიტური მიბმის შორის სრულყოფილი ბალანსი. ჩვენი Მაგნიტური ჩაშენებული სინქრონიზაციის ბელტები შეიძლება ერთდროულად უზრუნველყოს მოძრაობის სინქრონიზაცია და ვერტიკალური დაჭერის ძალა. მაგნიტური ძალის მაღალი ხარისხის პოლიურეთანის (PU) ბელტში მაღალი ძალის მაგნიტების პირდაპირ ჩაშენებით, ეს ბელტები საშუალებას აძლევს რობოტებს უფრო დარწმუნებულად გადაადგილდნენ ვერტიკალურ სარკინის ზედაპირებზე — მაგალითად, ნავების კორპუსებზე, საცავე ტანკებზე და სამრეწველო ინფრასტრუქტურაზე.
Გარე მაგნიტური ტრეკებისგან განსხვავებით, ჩვენი ინტეგრირებული დიზაინი უზრუნველყოფს გლუვ და დაბალ პროფილს, რაც მნიშვნელოვნად ამცირებს რობოტის წონას, ხოლო მაგნიტური მიბმის მაქსიმალური ძალა ინარჩუნება.
Ვერტიკალური ოპერაციების მიზნით განვითარებული სამრეწველო ტექნოლოგია:
Ოპტიმიზებული მაგნიტური მასივი: Ჩვენ ვიყენებთ მაღალი სიმჭიდროვის Ნეოდიმიუმი (NdFeB) მაგნიტებს, რომლებიც ზუსტად არის განლაგებული და ბელტში დაცული, რათა მაქსიმალურად გაზრდას შეძლოს გაუსის გამომსავლელობა და სტრუქტურული მტკიცებულება შეინარჩუნოს.
Უმაღლესი ხახუნი და მიბმა: Ძირითადი რემელი წარმოებულია მაღალი ხახუნის პოლიურეთანისგან , რაც უზრუნველყოფს მარეგულირებლის ბრუნვადი ბორბლების ჩაკეცვას ვერტიკალური გადასვლების ან შეუცდომელი გაჩერების დროს.
Მსუბუქი წონის, მაგრამ მძლავრი: Გამაგრებული Კევლარის ან ფოლადის ძაფები , ამ რემელებს აქვთ საჭიროების მიხედვით საკმარისი გამძლეობა რომ მოახერხონ რობოტის წონის მოტანა რემელის გაჭიმვის ან ჩაძირვის გარეშე დროთა განმავლობაში.
Ვიბრაციის შემცირება: PU ძირი მოქმედებს როგორც შოკის შემკავებელი, რაც გლუვავს რობოტის მოძრაობას არაერთგვაროვან ფოლადის ზედაპირებზე და იცავს შიგა მაგნიტურ სტრუქტურას.
| Თვისება | Სპეციფიკაცია |
| Ძირითადი რემელის ტიპი | T10 / AT10 / 8M / 5M (მორგებადი) |
| Ქვეყნური მასალა | Მაღალი ხელოვნური შეჭიდვის თერმოპლასტიკური პოლიურეთანი (PU) |
| Მაგნიტის მასალა | Სამრეწველო ნეოდიმიუმი (NdFeB) |
| Შეჭიდვის ძალა | Მორგებული მაგნიტური სიმკვრივის მიხედვით (N/სმ²) |
| Გაძლიერება | Კევლარი (მცირე წონისთვის) ან ფოლადი საყელო (მაღალი ტვირთისთვის) |
| Ზედაპირის დასრულება | Გლუვი ან ანტისრიალების ტექსტურა |
| Პოზიციონირების დაშვებული ცდომილება | ±0,05 მმ (სიზუსტის მაღალი ხარისხის CNC ჩაღება) |
| Ქიმიური მწარმომაგრებელობით | Მისაღები ნავთის, წყლის და სუფთავების სითხეების მიმართ |
| Ოპერაციული ტემპერატურა | -10°C-დან +70°C-მდე |
💡 ინჟინერული რჩევები პერსონალიზაციისთვის:
Წონის ოპტიმიზაცია: Კედლებზე ასვლელი მოწყობილობებისთვის წონა განსაკუთრებით მნიშვნელოვანია. ჩვენ ძლიერ რეკომენდაციას ვაძლევთ Კევლარის გაძლიერებას რომელიც წყვილდება Ნეოდიმიუმის (NdFeB) მაგნიტებს უმაღლესი "მიბმის-წონის" შეფარდების მისაღებად.
Ზედაპირის ხახუნი (ანტისლაიდი): Თუ რობოტი მუშაობს გლუვ ან დახრილ ზედაპირებზე, მაგნიტებზე დამატებითი 1 მმ-იანი ხელოვნური რეზინის საფარი რეკომენდირებულია. ეს არ მხოლოდ მაგნიტებს დარტყმისგან იცავს, არამედ ასევე საჭიროებულ ხახუნს აძლევს ქვევით გლურგვის თავიდან ასაცილებლად.
Შესაძლებლობა გადაცემის ბრუნვას შეესატყოს: Თუ მაგნიტები ჩასმულია კბილების მხარეს, გთხოვთ, დარწმუნდეთ, რომ თქვენი მართვის ბრუნვას შეესატყოს პულიები მომზადებულია არამაგნიტური მასალებისგან (მაგალითად, ალუმინი ან 300-ე სერიის ნეიროსგან მომზადებული მაგრი ფოლადი), რათა თავიდან აიცილოთ მაგნიტური წინააღმდეგობა ან კოგინგის შეფერხება.







