 EN
EN
 AR
AR
 HR
HR
 DA
DA
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 IS
IS
 HY
HY
 AZ
AZ
 KA
KA
 BN
BN
 LA
LA
 MR
MR
 MY
MY
 KK
KK
 UZ
UZ
 KY
KY

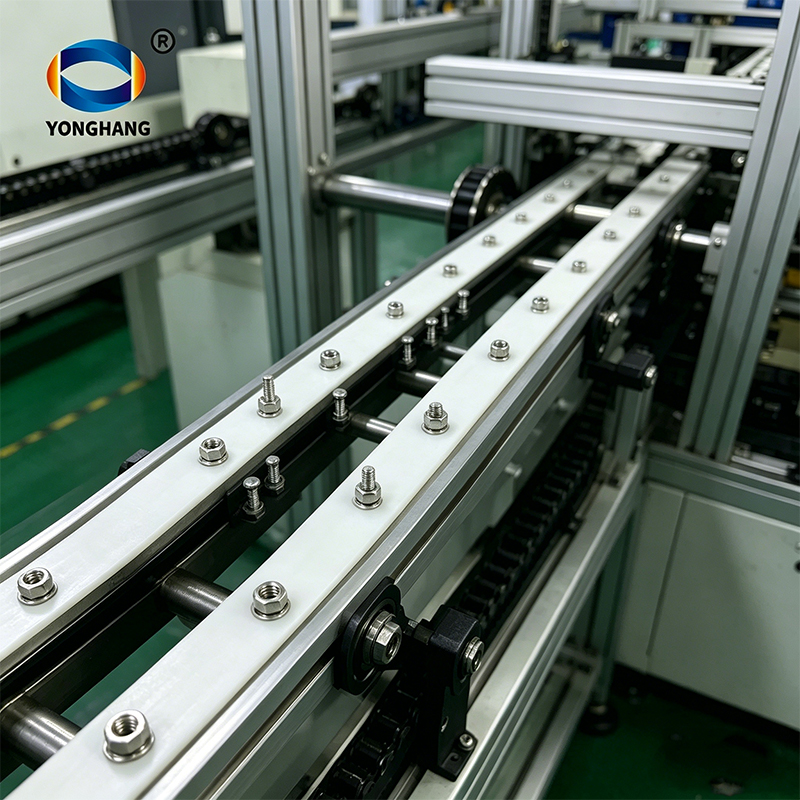



Cingula Temporalia Magnetica Praecisa Incorporata
Cingula temporis altae perficientiae ex poliurethano cum magnete inclusis ad praecisam positionem, automaticam sensum et systemata sortitionis. Habent tascula CNC scalpta, incorporationem sine ulla interference, et renfortem ex funibus ferreis. Polarity et intervalla magnetica ad mensuram disponibilia.
- Introductio
Introductio
Cingula Temporalia Magnetica Praecisa Incorporata: Futurum Sensus Automatizati
Yonghang’s Cingula Temporis Magnetica Inclusa ad usus industriales fabricata sunt, quae postulant positionem micro-precisam et retroactionem automatizatam. Per incorporationem magnetorum permanentium directe in corpus cinguli temporalis poliurethanici altius tenacis, machinis vestris permittimus ut «communicent» cum sensoribus Hall aut interruptoribus reed sine contactu physico.
Haec technologia tollit necessitatem markerum externorum ingentium, praebens solutionem expeditam et tenuem pro sortitione altius velocitatis, conplicatione synchrona, et systematibus convectricis sapientibus.
Praecipuae Proprietates Technicae:
Incorporatio CNC Praecisa: Unusquisque magnes in cavitate a machina CNC excisa continetur, ita ut superficies magnetis perfecte aequetur cum dorso cinguli aut dentibus. Hoc interfectionem mechanicam cum puleiis et rotulis praevenit.
Stabilitas Sine Dilatatione: Constructa sunt ex cordis altius tractionis ferreis aut Kevlar , ut distantiā inter magnēta constāns maneat etiam sub oneribus grāvibus aut in operātiōnibus celeribus.
Clausa ad Durābilitātem: Magnēta hermētice clauduntur per processum vulcanizātiōnis secundāriam aut per adhēsīva industriālia fortia, eōs ab ōleīs, umōre et sordibus protegentia.
Polaritās Magnētica Ad Hominem: Orientātiō ad hōminem (Boreālis/Austrālis) et intensitātēs certae campī magnētici (valōrēs Gauss) praebēmur, ut cum sensibilitāte sensoris tui congruant.
Applicationes typicae:
Classificātiō Automāta: Identificātiō celeris fasciculōrum vel componentium.
Automātiō Laboratōriī Medicī: Locātiō praecīsa vāsōrum et fialārum pro speciminibus.
Machinae impaquetandi: Synchronizātiō lineārum implētiōnis et obstrūctiōnis multistadiōrum.
Actuatores Lineares Robotici: Sensus positionis domus et limitum sine contactu.
| Caracteristicum | Specificatio |
| Profila Cinguli Basi | T5, T10, AT5, AT10, 5M, 8M, XL, L (Alia adhiberi possunt) |
| Materies loricis | Polyurethanum Thermoplasticum (PU) — 92 Shore A |
| Typus Magnetis | Neodymium (NdFeB) / Ferrum |
| Figurae Magnetarum | Discus, Rectangulum, aut Cylindrus |
| Profunditas Inserendi | Aequata cum superficie / Incassata / Subsuperficialis |
| Accuratudo positionis | ± 0,05 mm (controlatus per CNC) |
| Polaritas Magnetica | Alternatio N/S aut schemata N/S constans |
| Firmamentum | Cordus Ferreus / Cordus Kevlar / Ferrum Inox |
| Temperatura operationis | −20 °C ad +80 °C (gradus speciales ad altas temperaturas disponibiles) |







