 EN
EN
 AR
AR
 HR
HR
 DA
DA
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 IS
IS
 HY
HY
 AZ
AZ
 KA
KA
 BN
BN
 LA
LA
 MR
MR
 MY
MY
 KK
KK
 UZ
UZ
 KY
KY
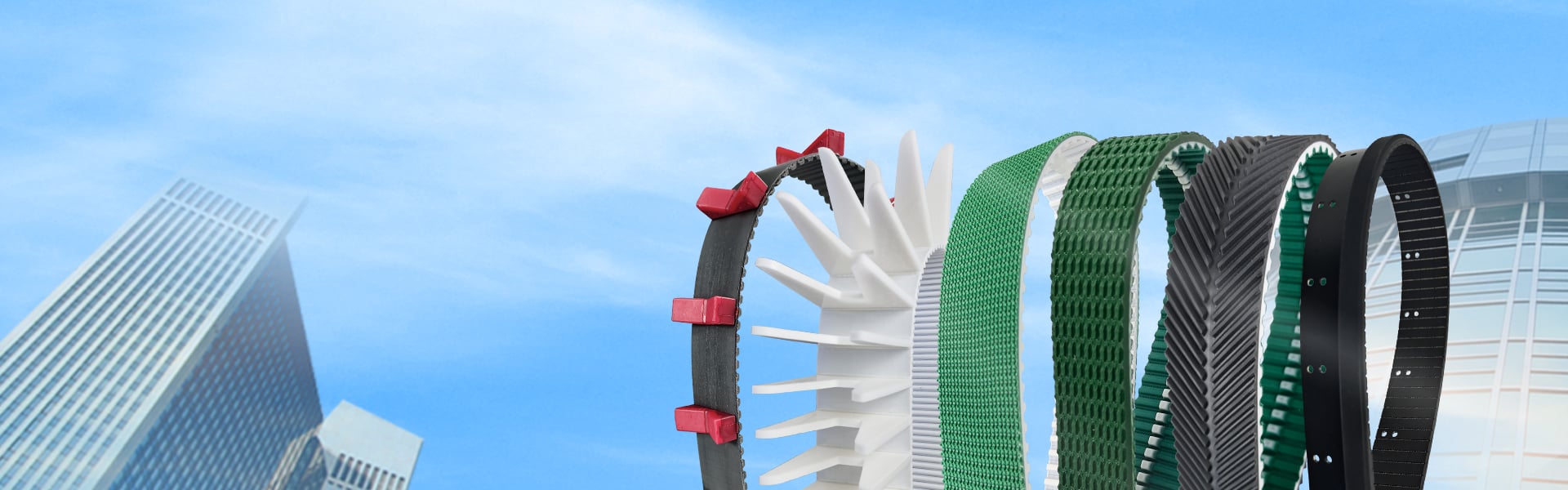




PV 청소 로봇용 산업용 크롤러 트랙 | 65 Shore A 고내구성 벨트
합성 고무 코팅이 적용된 고성능 PU 크롤러 트랙 벨트로, 태양광 청소 로봇에 적합합니다. 16~19도 경사면에서 최적화된 62~65 Shore A 경도를 갖추고 있습니다. 내구성과 동기화 성능, 마모 저항성이 뛰어납니다.
- 서론
서론
제품 개요
당사의 전문적인 제품을 통해 자동화된 태양광 유지보수 시스템의 신뢰성을 높이세요 크롤러 트랙 벨트 특히 광복전지(PV) 세정 로봇용으로 특별히 설계된 용으로 특별 설계된 이 트랙은 구조적 강성과 표면 접착력 사이에서 완벽한 균형을 제공합니다.
부드러운 대체재와 달리, 이 시리즈는 강화된 62–65 Shore A 합성 고무 코팅 을 채택했습니다. 이 특정 경도 등급은 장기적인 마모 저항성과 일관된 그립 성능이 무엇보다 중요한 중량급 청소 주기에 최적화되어 있습니다. 고강도 열가소성 폴리우레탄(PU) 기재에 통합된 이 트랙은 로봇 장치가 태양광 어레이를 정확하고 흔들림 없이 주행할 수 있도록 보장합니다.
기술 사양
| 특징 | 규격 세부사항 |
| 기지 건설 | 열가소성 폴리우레탄(PU) |
| 코팅 재료 | 고급 합성 고무 |
| 표면 경도 | 62–65 Shore A (내구성 및 내마모성 우수) |
| 작동 경사도 | 최적화된 16°~19° 기울기 |
| 내부 보강 | 연속 나선형 강선 코드 |
| 마찰 수준 | 균형 잡힌 고발진력/저마모성 |
주요 성능 우위
최적화된 경사 성능
중간 수준의 경사각에 맞춰 설계된 이 트랙은 16도에서 19도까지의 작동 경사각을 지원하도록 평가되었습니다 . 62–65 Shore A의 경도는 초연성 벨트에서 발생하는 과도한 변형 없이 안정적인 상향 이동을 유지하기 위한 충분한 기계적 '그립력'을 제공하여 로봇이 직진 경로를 유지할 수 있도록 합니다.
향상된 내구성 및 수명 주기
합성 고무 코팅의 높은 뒤로메터(경도)는 마찰에 의한 열과 연마성 먼지에 대한 우수한 저항성을 제공합니다. 이는 건조하거나 모래가 많은 환경에서 로봇이 반복적이고 장거리 청소 작업을 수행하는 대규모 태양광 발전소에 이상적인 선택입니다.
동기식 구동 정확도
The PU 베이스 벨트 정밀 성형 타이밍 프로파일(T10, AT10 또는 8M 규격 제공)을 특징으로 하며, 강선으로 보강되어 있습니다. 이 '제로 스트레치' 설계는 좌우 트랙이 완벽하게 동기화되도록 보장하여 로봇의 편향을 방지하고 조향 모터에 가해지는 부하를 줄입니다.
환경적 회복력
태양광 발전 현장의 강렬한 자외선(UV) 복사와 극단적인 온도 변화를 견딜 수 있도록 특별히 제조된 합성 고무는 시간이 지나도 구조적 완전성을 유지합니다. 일반 고무에서 흔히 발생하는 '경화' 현상을 억제하여 사용 기간 내내 그 접지 성능을 보존합니다.
응용 분야
건식 청소 로봇 시스템: 실용 규모의 사막 설치 현장에서 중량 먼지와 모래를 제거하기에 완벽합니다.
자동 세척 로봇: 회전 브러시 또는 중량 세정 헤드가 장착된 로봇에 안정적인 이동을 제공합니다.
산업용 옥상 태양광(PV) 유지보수: 중간 피치 상업용 태양광 어레이에서 신뢰할 수 있는 내비게이션 기능을 제공합니다.
전문 엔지니어링 통찰력
다음 범위 내에서 작동하는 로봇의 경우 16–19도 범위 , the 62–65 Shore A 이 코팅은 부드러운 등급보다 자주 선호되는데, 이는 '구름 저항(rolling resistance)'을 최소화하기 때문입니다. 이로 인해 로봇 배터리의 전력 소비가 줄어들어 더 긴 세정 임무 수행이 가능해지고 충전 사이클 횟수도 감소합니다.







