 EN
EN
 AR
AR
 HR
HR
 DA
DA
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 IS
IS
 HY
HY
 AZ
AZ
 KA
KA
 BN
BN
 LA
LA
 MR
MR
 MY
MY
 KK
KK
 UZ
UZ
 KY
KY
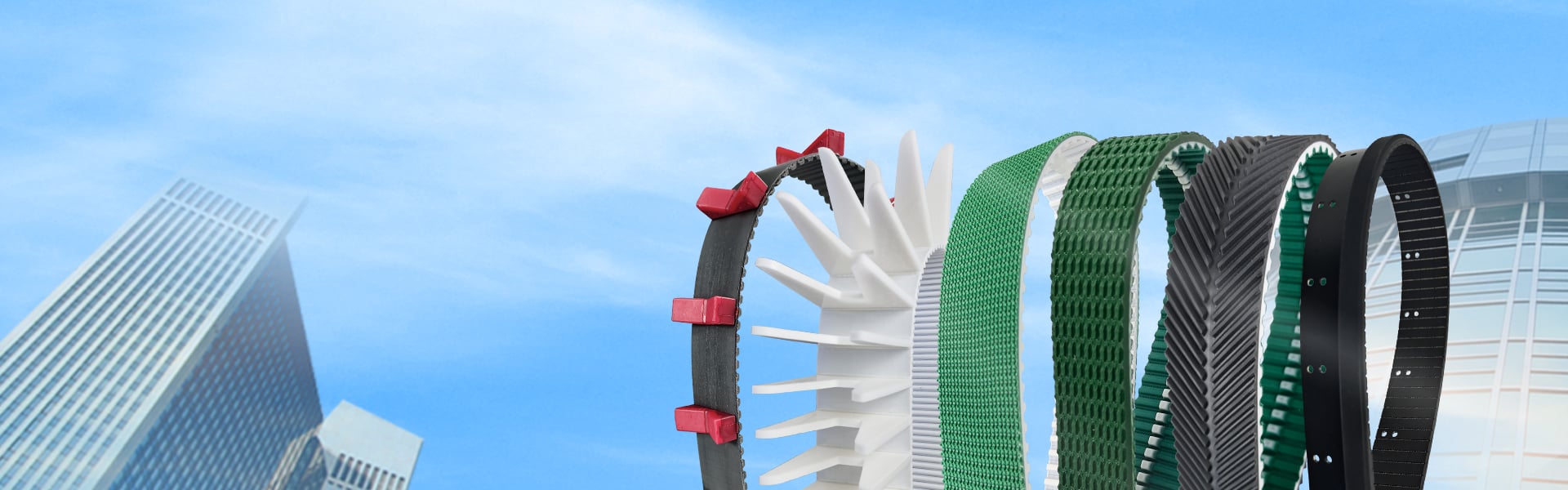





壁面登攀ロボット用磁気内蔵タイミングベルト
壁面登攀ロボット向けにカスタム設計された、内蔵永久磁石付き高性能タイミングベルト。高強度ポリウレタン(PU)、軽量ネオジム磁石、およびゼロストレッチ補強を特徴とします。ヨンハン社が精密設計した磁気付タイミングベルトにより、ロボットの垂直方向への接着性および駆動同期性能を最適化してください。
- はじめに
はじめに
磁性埋込タイミングベルト:壁面を這うロボットの駆動を支える
壁面を這うロボットには、軽量な機動性と信頼性の高い磁気吸着力を両立させることが不可欠です。当社の 磁性埋込タイミングベルト は、駆動の同期と垂直方向への保持力という二つの機能を同時に実現するよう設計されています。高摩擦性ポリウレタン(PU)ベルトに高強力磁石を直接埋め込むことで、これらのベルトは船舶の船体、貯蔵タンク、産業用インフラストラクチャーなどの垂直鋼鉄面を、ロボットが確実かつ安定して走行できるようにします。
外部設置型の磁気トラックとは異なり、当社の一体型設計により、スリムで低プロファイルな構造を実現し、ロボットの重量を大幅に軽減しつつ、最大級の吸着力を維持します。
垂直作業向けの先進的エンジニアリング:
最適化された磁石アレイ: 当社では高密度 ネオジミウム (NdFeB) 磁石を採用し、ベルト内部に正確な位置に配置・密封することで、構造的健全性を保ちながらガウス出力を最大化しています。
優れたトラクションおよびグリップ性能: ベースベルトは 高摩擦ポリウレタン から製造されており、垂直移動時や急停止時にドライブホイールが滑らないようにします。
軽量・高強度: 強化材は ケブラーまたは鋼線コード を採用したこれらのベルトは、ロボットの重量を支えるのに必要な引張強度を提供し、時間の経過によるベルトの伸びやたわみを防ぎます。
振動防止: PUベースは衝撃吸収材として機能し、凹凸のある鋼鉄表面でのロボットの動きを滑らかにするとともに、内部の磁気構造を保護します。
| 特長 | 仕様 |
| 主なベルト種別 | T10/AT10/8M/5M(カスタマイズ可能) |
| ベルト素材 | 高グリップ熱可塑性ポリウレタン(PU) |
| マグネット素材 | 産業用ネオジム(NdFeB) |
| 接着強度 | 磁石密度に応じてカスタマイズ可能(N/cm²) |
| 強化 | ケブラー(軽量向け)またはスチールコード(高負荷向け) |
| 表面仕上げ | 滑らかな表面または滑り止め加工 |
| 位置決め公差 | ±0.05 mm(高精度CNCポケット加工) |
| 化学耐性 | 油、水、洗浄液に耐性あり |
| 動作温度 | -10°C から +70°C |
💡 カスタマイズのためのエンジニアリング・ヒント:
重量最適化: 壁面走行用途では重量が極めて重要です。当社では強く推奨します ケブラー補強 と組み合わせて使用され、 ネオジム(NdFeB)磁石 最も高い「接着強度対重量比」を実現するため。
表面摩擦(滑り止め): ロボットが滑らかな面または傾斜面上で動作する場合、二次的な 1mmの柔らかいゴムコーティング を磁石の上に施すことを推奨します。これにより、磁石への衝撃から保護されるだけでなく、下降時の滑りを防ぐために必要な摩擦力を提供します。
プーリーとの互換性: 磁石が歯面側に埋め込まれている場合、駆動プーリーが 非磁性材料で製造されていることをご確認ください (例:アルミニウムまたは300番台ステンレス鋼)により、磁気ドラッグやコギング干渉を回避します。







