 EN
EN
 AR
AR
 HR
HR
 DA
DA
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 IS
IS
 HY
HY
 AZ
AZ
 KA
KA
 BN
BN
 LA
LA
 MR
MR
 MY
MY
 KK
KK
 UZ
UZ
 KY
KY
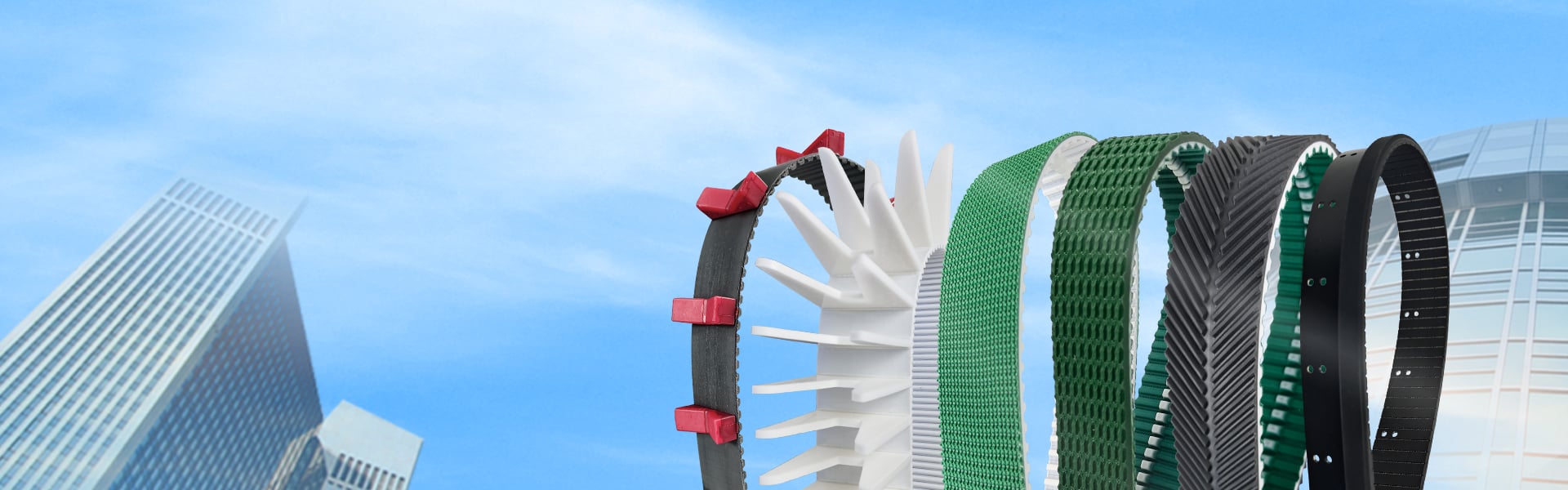





Մագնիսային ներդրված ժամանակաչափային ժապավեններ պատերին բարձրացող ռոբոտների համար
Բարձր կատարողականությամբ ժամանակաչափային ժապավեններ ներդրված մշտական մագնիսներով, որոնք հատուկ մշակվել են պատերին բարձրացող ռոբոտների համար: Բաղկացած է բարձր ամրության PU-ից, թեթև նեոդիմիումային մագնիսներից և զրոյական ձգման ամրացման տարրերից: Օպտիմալացրեք ձեր ռոբոտի ուղղահայաց կպչունությունը և շարժիչների համաժամացումը Yonghang-ի ճշգրտությամբ մշակված մագնիսային ժապավենների օգնությամբ:
- Ներածություն
Ներածություն
Մագնիսային ներդրված ժամանակաչափային ժապավեններ. Պատերի վրա բարձրացող ռոբոտների հզորացում
Պատերի վրա բարձրացող ռոբոտները պահանջում են թեթև շարժականության և հուսալի մագնիսային կպչունության միջև կատարյալ հավասարակշռություն: Մեր Մագնիսային ներդրված ժամանակաչափային ժապավենները նախատեսված են միաժամանակ ապահովելու շարժման համաժամացումը և ուղղահայաց պահման ուժը: Բարձր շփման PU ժապավենի մեջ անմիջապես ներդրելով բարձր հզորության մագնիսներ՝ այս ժապավենները հնարավորություն են տալիս ռոբոտներին վստահությամբ շարժվել ուղղահայաց երկաթե մակերեսներով՝ օրինակ՝ նավերի մարմիններով, պահեստավորման տանկերով և արդյունաբերական ենթակառուցվածքներով:
Ի տարբերություն արտաքին մագնիսային հետքերի՝ մեր ինտեգրված դիզայնը ապահովում է հարթ, ցածր պրոֆիլի կառուցվածք, որը զգալիորեն նվազեցնում է ռոբոտի քաշը՝ միաժամանակ պահպանելով մագնիսային կպչունության առավելագույն ուժը:
Վերևի գործողությունների համար մշակված առաջադեմ ճարտարագիտություն.
Օպտիմալացված մագնիսային զանգված. Մենք օգտագործում ենք բարձր խտության Նեոդիմիում (NdFeB) մագնիսներ, որոնք ճշգրիտ դիրքավորված են և ամրացված ժապավենի մեջ՝ մաքսիմալ Գաուսի արդյունք ստանալու և կառուցվածքային ամրությունը պահպանելու նպատակով:
Բարձրակարգ ճկունություն և կպչունություն. Հիմքի ժապավենը արտադրվում է բարձր շփման պոլիուրեթանից , որը ապահովում է, որ շարժիչի անիվները չսահեն ուղղահայաց տեղափոխումների կամ սudden կանգառների ժամանակ:
Ցածր քաշ՝ բարձր ամրություն. Որը հզորեցված է Կևլար կամ ստալյան մագլցողներ , այս ժապավենները ապահովում են անհրաժեշտ ձգման ամրությունը՝ ռոբոտի քաշը կրելու համար՝ առանց ժապավենի ձգվելու կամ ժամանակի ընթացքում կախվելու:
Վիբրացիայի թուլացման համակարգ. ՊՈՒ հիմքը հանդես է գալիս որպես շակատավորող, հարթեցնելով ռոբոտի շարժումը անհավասար ստալյան մակերեսների վրա և պաշտպանելով ներքին մագնիսային կառուցվածքը:
| Հատկություն | Տեխնիկական բնութագրեր |
| Հիմնական ժապավենի տեսակ | T10 / AT10 / 8M / 5M (Կարելի է հարմարեցնել) |
| Գործի նյութ | Բարձր բռնակավորման թերմոպլաստիկ պոլիուրեթան (ՊՈՒ) |
| Մագնիտի նյութ | Արդյունաբերական նեոդիմ (NdFeB) |
| Կպչունության ուժ | Հարմարեցված՝ ըստ մագնիսի խտության (N/սմ²) |
| Կառուցվածքներ | Քևլար (ցածր քաշի համար) կամ ստալյան լար (բարձր բեռնվածության համար) |
| Մակերևույթի մշակում | Շատրվանային կամ անսայթակ մակերես |
| Դիրքի ճշգրտություն | ±0,05 մմ (ճշգրիտ CNC փոսավորում) |
| Քիմիական դիմադրություն | Դիմացկուն է յուղերի, ջրի և մաքրման հեղուկների նկատմամբ |
| Օպերացիոն ջերմաստիճան | -10°C–ից +70°C |
💡 Հարմարեցման համար ինժեներական խորհուրդներ.
Քաշի օպտիմալացում. Պատերի վրա բարձրանալու համար կիրառություններում քաշը կարևորագույնն է: Մենք խիստ խորհուրդ ենք տալիս Կևլարի ամրապնակում համադրված Նեոդիմիում (NdFeB) մագնիսներ հասնելու ամենաբարձր «Ծակողականություն-Քաշ» հարաբերակցության:
Մակերևույթի շփման ուժ (սահելու դեմ) Եթե ռոբոտը շարժվում է հարթ կամ թեքված մակերևույթներով, ապա անհրաժեշտ է երկրորդային 1 մմ մեղմ ռետինե ծածկույթ մագնիսների վրա: Սա ոչ միայն պաշտպանում է մագնիսները հարվածներից, այլև ապահովում է անհրաժեշտ շփման ուժը՝ ներքև սահելու կանխարգելման համար:
Շառավիղների համատեղելիություն. Եթե մագնիսները տեղադրված են ատամների կողմում, ապա համոզվեք, որ ձեր շարժիչ շառավիղները պատրաստված են ոչ մագնիսական նյութեր (օրինակ՝ ալյումին կամ 300-ական շարքի չժանգոտվող պողպատ), որպեսզի խուսափեն մագնիսական դիմադրությունից կամ կոգինգի միջամտությունից:







